
監診實績

應用領域

常見問題
光阻塗佈機手臂動作如何監測,確保設備穩定度?
監診實績|光阻塗佈機手臂動作如何監測,確保設備穩定度?#半導體領域
#機器學習
#PHM
#機械手臂
專用於光阻塗佈機搬送晶圓的機械手臂必須具有高度的精度和穩定性,確保減小機械振動對晶圓表面的影響,如何確保手臂穩定度?
光阻塗佈機手臂
專用於光阻塗佈機搬送晶圓的機械手臂
在光阻塗佈過程中會影響晶圓品質的因素有很多,例如手臂的精度、穩定性、速度、機械振動等因素都有密切相關。機械手臂必須具有高度的精度和穩定性,以確保光阻均勻塗佈在整個晶圓表面。如果機械手臂有不穩定性或精確度問題,可能導致光阻層不均勻,進而影響後續製程步驟的品質。機械手臂的振動可能會傳遞到晶圓上,造成振動對光阻均勻性的影響。 因此,確保減小機械振動對晶圓表面的影響是非常重要的。

監測說明
VMS-ML 機器學習智能監控系統
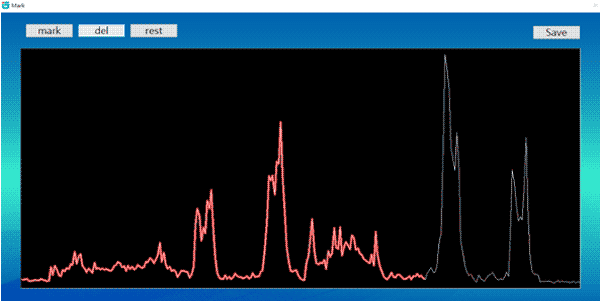
藉由 VMS-ML 機器學習智能監控系統,根據手臂取放晶圓、移動過程中,X軸、Y軸、Z軸、θ軸動作產生之綜合振動動態,在優良狀態下的進行規範學習,透過重覆性的動作訊號辨識與規範比對結果,細拆檢測手臂Z軸、Y軸θ軸、X軸與是否為穩定運行狀態,當判定為非穩定運作時,提前進行處置,達到機械動作品質檢測與預防保養目的。
量測狀況
動作:Robot transfer from main arm to cassette
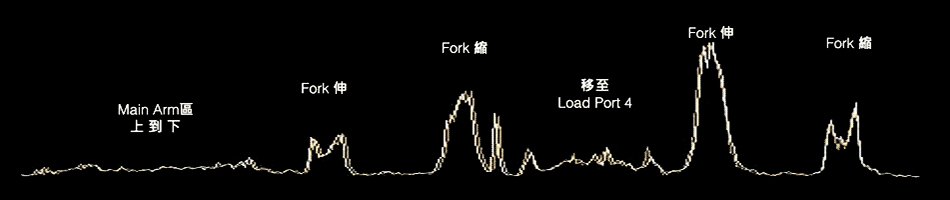
檢測目的:1. Z軸移動品質監測。2. X軸 (wafer取放)移動品質監測。
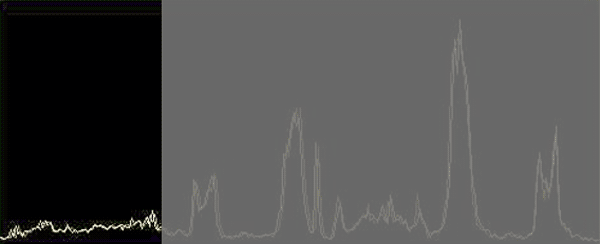
標記1:只針對Z軸判別
標記2:只針對X軸判別(放入slot1)
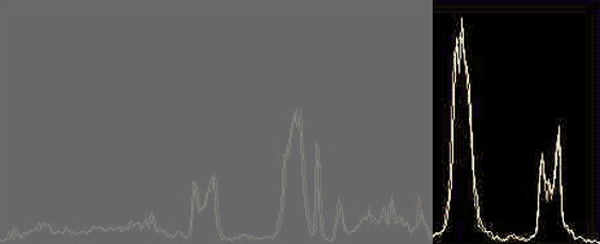
檢測目的:1. Y軸(動作包含θ軸)移動品質監測。 2. X軸 (wafer取放)移動品質監測。
標記1:只針對Y軸與θ軸判別
標記2:只針對X軸判別
測量結論
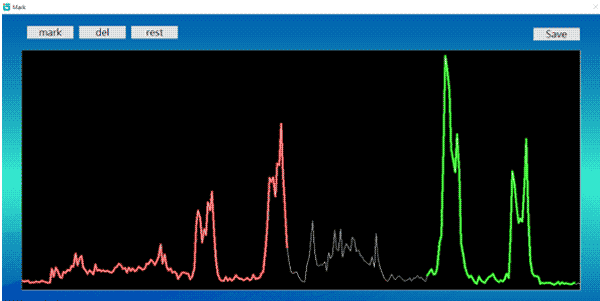
利用 VMS-ML 機器學習智能監控系統 學習正確動作行為作為規範,為各別動作進行監測與診斷,透過系統了解手臂在哪一個動作出現異常或不穩定的狀態,提早進行預知保養,避免無預警異常的發生。
利用 VMS-ML 監測手臂健康狀態能夠帶來的效益:防止手臂異常造成晶圓受損報廢、監測手臂搬送晶圓流程,警報異常刮片、撞片等。
VMS-ML 機器學習智能監控系統
常見問題(FAQ)
光阻塗佈機搬送手臂為什麼需要監測?
光阻塗佈機中的晶圓搬送手臂負責將晶圓精準搬送至塗佈位置,其運動精度與穩定性會直接影響光阻均勻度與製程品質。若手臂產生異常振動、定位偏移或動作不穩定,可能造成光阻厚度不均、晶圓刮傷、撞片或製程良率下降,因此需透過即時監測掌握設備健康狀態。
機械振動會如何影響光阻塗佈品質?
光阻塗佈製程需要極高的平整度與均勻性,若搬送手臂產生振動,振動能量可能傳遞至晶圓表面,造成光阻分布不均、厚度偏差及後續曝光製程異常,進而影響產品良率與製程穩定度。
VMS-ML 如何監測晶圓搬送手臂的健康狀態?
VMS-ML 機器學習智能監控系統可學習手臂在正常狀態下的動作訊號,並針對 X 軸、Y 軸、Z 軸及 θ 軸建立標準模型。當系統發現動態訊號與標準模型差異過大時,即可判定手臂可能出現異常或不穩定狀態,提前發出警示。
哪些手臂動作可以進行監測?
系統可監測晶圓取放、搬送、定位、旋轉及各軸向移動等重複性動作,透過動作訊號辨識與相似度分析,掌握各軸運作品質與穩定度。
導入手臂監測系統有哪些效益?
導入手臂監測系統可提前發現異常振動、定位偏差與機構磨耗問題,降低晶圓刮傷、撞片及製程中斷風險。同時可透過長期趨勢分析建立設備健康管理機制,提升設備可靠度與整體產線稼動率。
光阻塗佈機手臂適合做預知保養嗎?
適合。由於搬送手臂具備大量重複性動作特性,非常適合利用機器學習建立正常行為模型。當動作訊號逐漸偏離正常範圍時,即可提前安排維護作業,避免無預警停機與良率損失。
尋找半導體製程相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
