
監診實績

應用領域

常見問題
利用電流了解多軸手臂的作動狀態品質?
監診實績|利用電流了解多軸手臂的作動狀態品質?#機器學習
#機械手臂
多軸機械手臂是一種多關節機械臂,需要產生更大的轉動力矩時,則需要馬達以較大的電流來實現。
多軸機械手臂
多軸機械手臂就像是工業界的舞者,可以在三維空間中靈活地舞動。它的每個關節都像是它的舞蹈步伐,由馬達或伺服馬達來推動,就像是舞者的肌肉一樣。這些馬達會跟著減速器一起工作,以提供更大的轉矩和更精確的運動控制。透過控制這些馬達的轉動,可以實現機械手臂在各個關節上的運動。
多軸機械手臂的馬達驅動與電流之間有密切的關係,主要是因為馬達是透過電流來驅動的。當機械手臂進行運動時,每個關節的馬達都需要消耗電能來產生轉動力矩。因此,馬達的電流會隨著機械手臂的運動而變化。
具體而言,當機械手臂需要產生更大的轉動力矩時,馬達需要較大的電流來實現。這通常發生在機械手臂負載增加或需要克服阻力時,例如在舉起重物或對抗外部阻力時。相反,當機械手臂處於較輕的負載或靜止狀態時,馬達所需的電流較小。

背隙
背隙(backlash),背隙就像是機械系統中的一個小死區,就像是齒輪齒和齒之間的微小間隙。你可以把它想象成一種延遲現象,就像當你轉動一個齒輪時,開始轉動時可能會有一點延遲才會真正轉動起來,這是因為背隙的存在。有時候,這種延遲是不希望的,尤其是在需要精準控制的應用中,但有時候,我們也希望有一些背隙,這樣可以讓機械元件在運轉時更加靈活,避免卡死的情況發生。
背隙的存在有許多原因,比如為了讓機械元件能夠順暢地潤滑、因為機械公差、承受負載時的彈性、以及因為溫度變化引起的熱脹冷縮等。在機械系統中有時是必要的,有時是可以被接受的,而有時又是需要被盡可能地減少的。
監測說明
VMS-ML 機器學習智能監控系統
VMS-ML 機器學習智能監控系統能夠學習正確的規範,再藉由規範來比對狀態好壞,在本次量測中,我們在電控箱中利用CT監測電流來進行量測。由於多軸機械手臂的電流變化是由總軸數加總組成,訊號將會揉再一起。因此,若以電流監測方式,我們使用單軸或少軸組成動作作為此次監測標的,再藉由監測結果來判斷手臂作動是否穩定。
量測狀況
規範建立

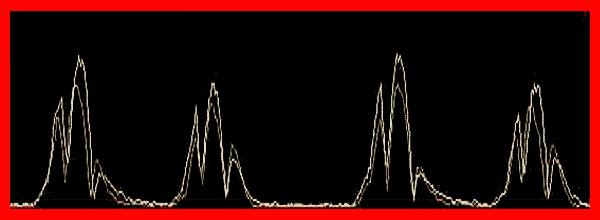
異音料件比對
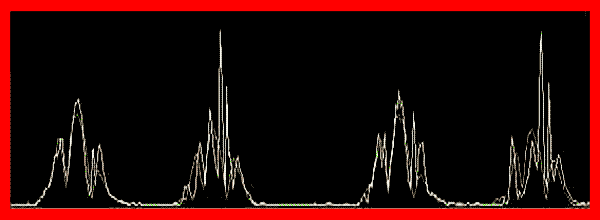
抖動料件比對
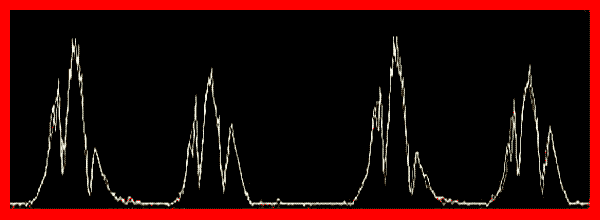
背隙料件比對
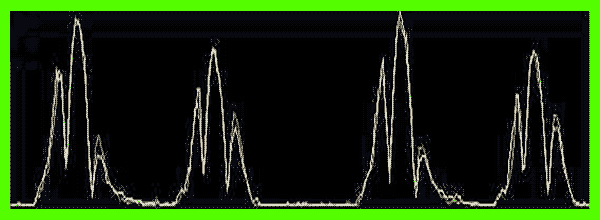
正常(些許異音)料件比對
測量結論
根據感測器反饋的信息,藉由系統訊號對比我們可以知道手臂電流狀態將影響手臂作動品質。馬達的電流穩定將實現精確的運動控制。這樣可以確保機械手臂在不同工作條件下都能夠穩定運行,同時最小化能量消耗和馬達的磨損。
VMS-ML 機器學習智能監控系統
VMS-ML 機器學習智能監控系統
及時攔截不良品
常見問題(FAQ)
多軸機械手臂為什麼可以透過電流監測作動品質?
多軸機械手臂的每個關節都由馬達或伺服馬達驅動,馬達電流會隨著負載、阻力與轉動力矩需求而變化。當手臂需要舉起重物、克服外部阻力或執行特定動作時,馬達需要較大的電流;當負載較輕或靜止時,電流則較小,因此可透過電流變化判斷手臂作動狀態。
多軸機械手臂電流不穩會造成什麼問題?
若多軸機械手臂電流不穩,可能代表馬達負載異常、關節阻力變化、背隙增加、抖動、異音或機構磨耗。這些問題會影響運動控制精度,使手臂作動不穩定,進而造成定位偏差、產品品質不良或設備磨損增加。
背隙 Backlash 會如何影響多軸機械手臂?
背隙是齒輪、傳動機構或關節之間的微小間隙,會讓動作開始時產生延遲或空行程。對需要精準控制的機械手臂而言,背隙可能造成定位誤差、動作反應不一致與控制精度下降,因此需要透過訊號比對及早發現。
VMS-ML 如何監測多軸手臂作動狀態?
VMS-ML 機器學習智能監控系統可先學習正確的手臂作動規範,再透過規範比對判斷狀態好壞。本案例在電控箱中利用 CT 監測電流,並以單軸或少軸組成動作作為監測標的,避免多軸電流訊號混在一起造成判讀困難。
多軸手臂可以監測哪些異常料件狀態?
透過 VMS-ML 建立規範後,可比較異音料件、抖動料件、背隙料件與正常料件的電流訊號差異。當即時訊號與正常規範差異過大時,系統可協助判斷手臂作動是否穩定,並找出可能造成品質異常的料件狀態。
導入多軸手臂電流監測有什麼效益?
導入多軸手臂電流監測後,可利用感測器反饋與系統訊號比對,掌握手臂電流狀態與作動品質。穩定的馬達電流有助於實現精確運動控制,確保機械手臂在不同工作條件下穩定運行,同時降低能量消耗與馬達磨損。
尋找機械手臂相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
