
Thực tế

Ứng dụng

Hỏi đáp
Làm thế nào để xác nhận tay robot của thiết bị PVD, CVD vận hành ổn định?
Thực tế giám sát| Làm thế nào để xác nhận tay robot của thiết bị PVD, CVD vận hành ổn định?Mục đích của quá trình lắng đọng màng mỏng là tạo đặc tính dẫn điện trên wafer. Làm thế nào để tránh các bất thường của tay robot PVD/CVD ảnh hưởng đến quy trình sản xuất? Làm sao để đảm bảo chuyển động vận hành luôn ổn định?
Tầm quan trọng của tay robot PVD/CVD đối với quy trình sản xuất
Nắm bắt trạng thái thiết bị để đảm bảo độ tin cậy và ổn định cao
Thiết bị PVD và CVD thường bao gồm nhiều bộ phận, trong đó tay robot là một thành phần quan trọng.
Tay robot chủ yếu được sử dụng để di chuyển wafer đến các vị trí khác nhau nhằm thực hiện các bước lắng đọng màng mỏng khác nhau.
Khi tay robot của thiết bị PVD hoặc CVD xảy ra bất thường, quá trình sản xuất có thể chịu nhiều ảnh hưởng tiêu cực.
Ví dụ, quy trình có thể buộc phải tạm dừng hoặc ngừng hoạt động, dẫn đến suy giảm hiệu suất sản xuất.
Thời gian dừng máy càng kéo dài thì tổn thất càng lớn.
Trong toàn bộ quy trình, tay robot chịu trách nhiệm di chuyển wafer đến các vị trí khác nhau nhằm đảm bảo lớp màng được lắng đọng đồng đều.
Bất thường trong chuyển động của tay robot có thể gây ra sự không đồng nhất trong quy trình, khiến kết quả xử lý của từng wafer không giống nhau.
Ngoài ra, sự cố của tay robot còn ảnh hưởng đến an toàn vận hành, tiềm ẩn rủi ro đối với thiết bị và nhân viên.
Do đó, người vận hành cần nắm rõ trạng thái thiết bị để đảm bảo mức độ tin cậy và ổn định cao,
qua đó bảo đảm quy trình sản xuất diễn ra liên tục và an toàn.

VHP-PVD-NSK

VHP-Producer-NSK
Mô tả phương thức giám sát
Hệ thống giám sát thông minh Machine Learning VMS-ML
VMS-ML có khả năng trực quan hóa tín hiệu động học của thiết bị CVD và PVD kết hợp với các hành vi chuyển động được học bằng máy.
Thông qua việc học và đo lường chuyển động cơ khí, hệ thống không chỉ giúp nhận biết sự khác biệt về độ ổn định trong quá trình vận hành của thiết bị,
mà còn sử dụng xu hướng dữ liệu để xây dựng tiêu chuẩn đánh giá độ ổn định của máy.
Ngoài ra, hệ thống còn có thể được dùng để xác nhận hiệu quả sau bảo trì,
đồng thời đóng vai trò như bước kiểm chứng trước khi thiết bị được đưa trở lại dây chuyền sản xuất.
Tình trạng đo lường
1. Lắp đặt cảm biến: VMS-ML sử dụng sensor gắn ngoài, không cần kết nối trực tiếp với tín hiệu của thiết bị!
Có thể ngay lập tức bắt đầu xây dựng mô hình học chuẩn cho máy và tiến hành giám sát trạng thái thiết bị.
Minh họa trực quan tín hiệu động của máy và hành vi học máy:
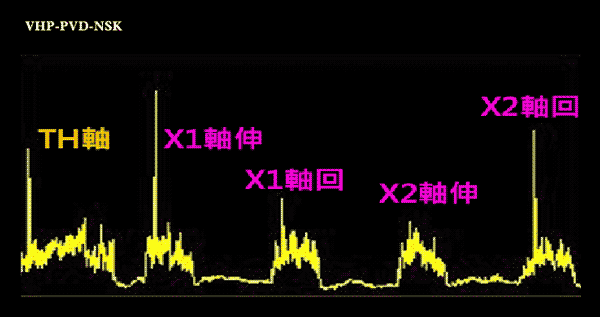
Model 1: VHP-PVD-NSK
Mô tả chuyển động: Trục TH quay, sau đó trục X1 tiến ra và quay về vị trí ban đầu, tiếp theo là trục X2 thực hiện chuyển động.
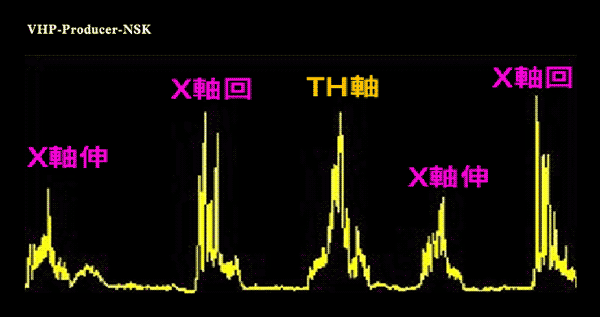
Model 2: VHP-Producer-NSK
Mô tả chuyển động: Trục X tiến ra và quay về vị trí ban đầu, sau đó trục TH quay sang phía đối diện, tiếp theo trục X còn lại tiến ra và quay về vị trí ban đầu.
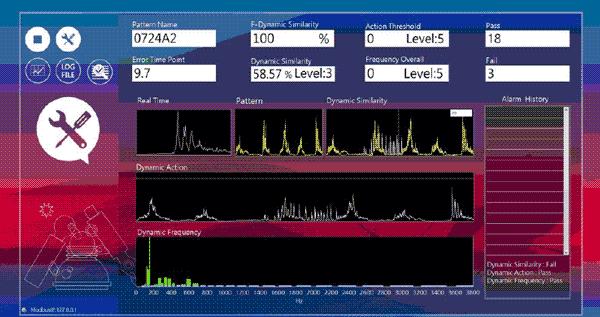
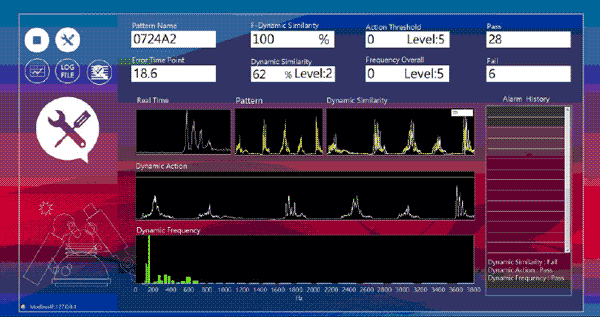
2. Hệ thống tự động theo dõi các tín hiệu đặc trưng, có thể tự động phát hiện các tín hiệu mục tiêu đã được hiệu chuẩn trong quá trình giám sát thời gian thực.
Từ các chuyển động đơn giản đến phức tạp đều có thể được tự động nhận diện và truy vết.
Mô phỏng bất thường và quản lý trực quan đối với thiết bị VHP-PVD-NSK:

Kết quả đánh giá: Rung động khi vận hành trục X1 và X2.

Kết quả đánh giá: Xung bất thường khi trục X2 khởi động và thu về.

Kết quả đánh giá: Rung động toàn bộ thiết bị.

Kết quả đánh giá: Rung động khi vận hành trục X2.
机台VHP-Producer-NSK异常模拟判别与可视化管理:

Kết quả đánh giá: Mài mòn khi trục X tiến ra và thu về.
Kết quả đánh giá: Bất thường khi trục X tiến ra và dừng lại.

Kết quả đánh giá: Rung động toàn bộ thiết bị.
Kết quả đánh giá: Bất thường khi khởi động trục TH.
Kết luận đo lường
Thông qua hệ thống giám sát thông minh VMS-ML, có thể xây dựng quy chuẩn tiêu chuẩn hóa cho toàn bộ quy trình chuyển động của tay robot trên thiết bị, đồng thời phát hiện kịp thời các tín hiệu bất thường. Nhờ đó, hệ thống giúp ngăn chặn các lỗi phát sinh do tay robot hoạt động không ổn định, tránh ảnh hưởng đến chất lượng thành phẩm và suy giảm tỷ lệ đạt (yield).
Sau khi dữ liệu vận hành được xu hướng hóa (trend analysis), người sử dụng có thể nắm bắt chính xác tình trạng hoạt động của tay robot, dự đoán thời điểm có khả năng xảy ra bất thường của thiết bị. Ngoài ra, các dữ liệu này còn có thể được sử dụng làm cơ sở so sánh tiêu chuẩn trước và sau khi thiết bị được đưa vào bảo trì hoặc sửa chữa trong nhà máy.

Các câu hỏi thường gặp (FAQ)
Tại sao cần giám sát độ ổn định hoạt động của cánh tay robot máy PVD, CVD?
Cánh tay robot của máy PVD và CVD chịu trách nhiệm di chuyển wafer đến các vị trí khác nhau để hoàn thành quy trình lắng đọng màng mỏng. Nếu cánh tay hoạt động không ổn định, rung lắc hoặc định vị bất thường, nó có thể gây gián đoạn quy trình, lắng đọng màng không đồng đều, kết quả xử lý wafer không nhất quán, thậm chí ảnh hưởng đến an toàn của thiết bị và nhân viên. Do đó, cần phải giám sát trạng thái hoạt động của cánh tay theo thời gian thực.
Sự cố cánh tay robot máy PVD, CVD có thể gây ra những ảnh hưởng nào đến quy trình?
Bất thường ở cánh tay robot có thể dẫn đến tạm dừng quy trình, giảm năng suất, vận chuyển wafer không ổn định, lắng đọng màng không đồng đều, giảm tỷ lệ đạt yêu cầu và thành phẩm lỗi ở các bước sau. Nếu không được phát hiện kịp thời, nó cũng có thể gây hư hỏng thiết bị hoặc rủi ro an toàn quy trình.
VMS-ML giám sát cánh tay robot máy PVD, CVD như thế nào?
Hệ thống giám sát thông minh học máy VMS-ML có thể kết nối với cảm biến bên ngoài mà không cần kết nối với tín hiệu của thiết bị để học các tín hiệu động khi cánh tay máy hoạt động bình thường. Hệ thống sẽ trực quan hóa các hành động cơ học và tự động theo dõi các tín hiệu đặc trưng để đánh giá xem hoạt động của cánh tay có đi lệch khỏi mô hình bình thường hay không.
Những hành động nào của cánh tay PVD, CVD có thể được giám sát?
Hệ thống có thể giám sát chuyển động xoay trục TH, chuyển động vươn ra và thu về của trục X1, hoạt động của trục X2, chuyển động vươn ra và thu về của trục X, cũng như các hành động liên tục phức tạp trong các mô hình máy khác nhau. Từ các hành động cơ học đơn giản đến phức tạp đều có thể được theo dõi đặc điểm và nhận dạng bất thường thông qua mô hình học.
VMS-ML có thể đánh giá những bất thường nào của cánh tay PVD, CVD?
VMS-ML có thể được sử dụng để đánh giá tình trạng rung lắc khi vận hành trục X1 và X2, đột biến bất thường khi khởi động và thu hồi trục X2, rung lắc của máy, mài mòn khi trục X vươn ra và thu về, dừng bất thường khi trục X vươn ra và khởi động bất thường ở trục TH, hỗ trợ các kỹ sư nhanh chóng nắm bắt vị trí và loại hình bất thường.
Lợi ích của việc triển khai giám sát cánh tay PVD, CVD là gì?
Sau khi triển khai giám sát cánh tay, có thể thiết lập các quy chuẩn chuẩn hóa cho quy trình hoạt động của cánh tay máy, phát hiện sớm các bất thường, tránh gây ra thành phẩm lỗi ở các bước sau và giảm tỷ lệ đạt yêu cầu do cánh tay bất thường. Thông qua quản lý xu hướng dữ liệu, cũng có thể dự đoán thời điểm xảy ra sự cố thiết bị và dùng làm cơ sở để so sánh trước và sau khi bảo trì cũng như xác minh khi nhập xưởng.
Đọc thêm
Ảnh hưởng của vi rung động môi trường đối với máy Laser Grooving?
Trạng thái hoạt động của cánh tay Bond Head trên máy gắp đặt (die bonder)?
Làm thế nào để thực hiện đo lường trên trục chính máy mài wafer?
Làm thế nào để đảm bảo độ ổn định của cánh tay máy phủ cản quang?
Hệ thống giám sát thông minh học máy VMS-ML
Không biết thiết bị của bạn đang gặp vấn đề gì?
Tốc độ bảo trì tăng 7 lần, tiết kiệm ngân sách bảo dưỡng hàng năm