
Thực tế

Ứng dụng

Hỏi đáp
Làm thế nào để giám sát chuyển động tay robot của máy phủ photoresist nhằm đảm bảo độ ổn định của thiết bị?
Thực tế giám sát |Làm thế nào để giám sát chuyển động tay robot của máy phủ photoresist nhằm đảm bảo độ ổn định của thiết bị?Tay robot chuyên dùng để vận chuyển wafer trong máy phủ photoresist phải có độ chính xác và độ ổn định rất cao nhằm giảm thiểu ảnh hưởng của rung động cơ học lên bề mặt wafer. Vậy làm thế nào để đảm bảo độ ổn định của tay robot?
Tay robot của máy phủ photoresist
Tay robot chuyên dùng để vận chuyển wafer trong máy phủ photoresist
Trong quá trình phủ photoresist, có rất nhiều yếu tố ảnh hưởng trực tiếp đến chất lượng wafer, chẳng hạn như độ chính xác, độ ổn định, tốc độ vận hành và rung động cơ học của tay robot.
Tay robot phải đạt độ chính xác và độ ổn định cao để đảm bảo lớp photoresist được phủ đồng đều trên toàn bộ bề mặt wafer.
Nếu tay robot xảy ra hiện tượng mất ổn định hoặc sai lệch về độ chính xác, lớp photoresist có thể bị phủ không đồng đều, từ đó ảnh hưởng nghiêm trọng đến chất lượng của các công đoạn xử lý tiếp theo.
Ngoài ra, rung động của tay robot có thể truyền trực tiếp lên wafer, gây ảnh hưởng đến độ đồng đều của lớp phủ photoresist.
Vì vậy, việc giảm thiểu tối đa rung động cơ học tác động lên bề mặt wafer là yếu tố then chốt để đảm bảo chất lượng và độ ổn định của toàn bộ quy trình sản xuất.

Mô tả phương pháp giám sát
Hệ thống giám sát thông minh học máy VMS-ML
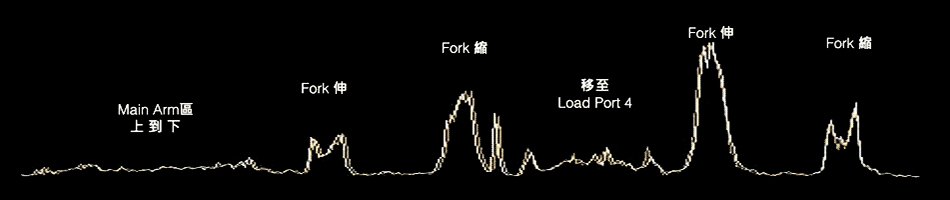
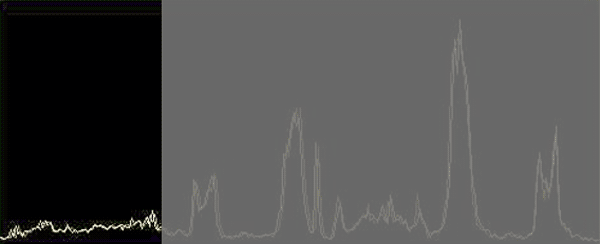
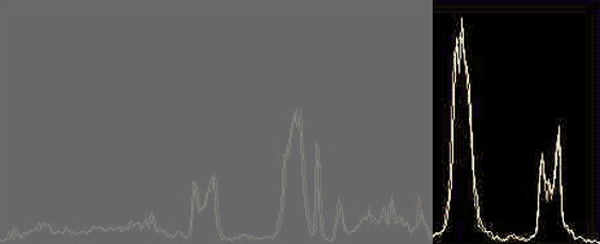
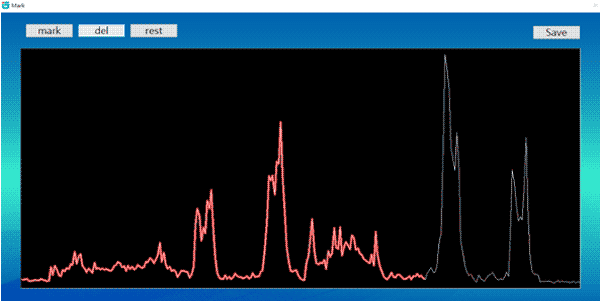
Thông qua hệ thống giám sát thông minh học máy VMS-ML, các tín hiệu rung động tổng hợp phát sinh trong quá trình tay robot thực hiện thao tác gắp – đặt wafer và di chuyển theo các trục X, Y, Z và trục θ sẽ được thu thập và học mẫu trong trạng thái vận hành tốt làm chuẩn.
Bằng cách nhận dạng lặp lại các tín hiệu động học của từng thao tác và so sánh với mô hình chuẩn đã học, hệ thống có thể phân tích chi tiết tình trạng vận hành của từng trục, bao gồm trục Z, trục Y, trục θ và trục X, để xác định xem tay robot có đang hoạt động ổn định hay không.
Khi phát hiện trạng thái vận hành không ổn định, hệ thống sẽ đưa ra cảnh báo sớm, cho phép người vận hành xử lý kịp thời, từ đó đạt được mục tiêu kiểm soát chất lượng chuyển động cơ học và bảo trì dự đoán, ngăn ngừa sự cố phát sinh ngoài dự kiến.
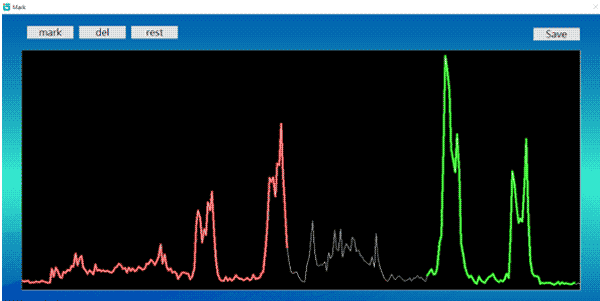
Tình trạng đo lường
Thao tác: Robot chuyển wafer từ tay chính sang cassette
Mục tiêu kiểm tra:
1. Giám sát chất lượng chuyển động của trục Z.
2. Giám sát chất lượng chuyển động của trục X (thao tác gắp – đặt wafer).
Đánh dấu 1: Chỉ đánh giá trục Z
Đánh dấu 2: Chỉ đánh giá trục X (đặt wafer vào slot 1)
Mục tiêu kiểm tra:
1. Giám sát chất lượng chuyển động của trục Y (bao gồm chuyển động trục θ).
2. Giám sát chất lượng chuyển động của trục X (thao tác gắp – đặt wafer).
Đánh dấu 1: Chỉ đánh giá trục Y và trục θ
Đánh dấu 2: Chỉ đánh giá trục X
Kết luận đo lường
Thông qua hệ thống giám sát thông minh học máy VMS-ML, các hành vi chuyển động chuẩn được học và thiết lập làm tiêu chuẩn, từ đó thực hiện giám sát và chẩn đoán cho từng thao tác riêng lẻ. Hệ thống cho phép xác định chính xác thao tác nào của cánh tay robot xuất hiện trạng thái bất thường hoặc mất ổn định, giúp triển khai bảo trì dự đoán sớm và tránh các sự cố bất thường không báo trước.
Lợi ích khi sử dụng VMS-ML để giám sát tình trạng sức khỏe của cánh tay robot bao gồm: ngăn chặn hư hỏng wafer do sự cố của tay robot, giám sát toàn bộ quy trình vận chuyển wafer, và phát cảnh báo sớm các bất thường như trầy xước wafer, va chạm wafer hoặc lỗi thao tác.
Hệ thống giám sát thông minh học máy VMS-ML
Các câu hỏi thường gặp (FAQ)
Tại sao cần giám sát cánh tay vận chuyển của máy phủ cản quang (photoresist coater)?
Cánh tay vận chuyển wafer trong máy phủ cản quang chịu trách nhiệm đưa wafer đến vị trí phủ một cách chính xác. Độ chính xác và độ ổn định khi di chuyển của nó sẽ ảnh hưởng trực tiếp đến độ đồng đều của lớp cản quang và chất lượng quy trình. Nếu cánh tay tạo ra rung động bất thường, sai lệch định vị hoặc chuyển động không ổn định, nó có thể gây ra độ dày cản quang không đồng đều, trầy xước wafer, va chạm wafer hoặc giảm tỷ lệ đạt yêu cầu của quy trình. Do đó, cần phải giám sát thời gian thực để nắm bắt tình trạng sức khỏe của thiết bị.
Rung động cơ học sẽ ảnh hưởng đến chất lượng phủ cản quang như thế nào?
Quy trình phủ cản quang đòi hỏi độ phẳng và độ đồng đều cực cao. Nếu cánh tay vận chuyển bị rung, năng lượng rung động có thể truyền đến bề mặt wafer, gây ra sự phân bố cản quang không đồng đều, sai lệch độ dày và các bất thường trong quy trình phơi sáng tiếp theo, từ đó ảnh hưởng đến tỷ lệ đạt yêu cầu của sản phẩm và độ ổn định của quy trình.
VMS-ML giám sát tình trạng sức khỏe của cánh tay vận chuyển wafer như thế nào?
Hệ thống giám sát thông minh học máy VMS-ML có thể học các tín hiệu chuyển động của cánh tay ở trạng thái bình thường và thiết lập mô hình tiêu chuẩn cho trục X, trục Y, trục Z và trục θ. Khi hệ thống phát hiện tín hiệu động chênh lệch quá lớn so với mô hình tiêu chuẩn, nó có thể xác định rằng cánh tay có thể đang ở trạng thái bất thường hoặc không ổn định và phát ra cảnh báo sớm.
Những chuyển động nào của cánh tay có thể được giám sát?
Hệ thống có thể giám sát các thao tác lặp đi lặp lại như gắp và đặt wafer, vận chuyển, định vị, xoay và di chuyển theo từng trục. Thông qua nhận dạng tín hiệu chuyển động và phân tích độ tương đồng, nắm bắt được chất lượng hoạt động và độ ổn định của từng trục.
Lợi ích của việc triển khai hệ thống giám sát cánh tay là gì?
Triển khai hệ thống giám sát cánh tay có thể phát hiện sớm các rung động bất thường, sai lệch định vị và hao mòn cơ cấu, giảm nguy cơ trầy xước wafer, va chạm và gián đoạn quy trình. Đồng thời, thông qua phân tích xu hướng dài hạn, có thể thiết lập cơ chế quản lý sức khỏe thiết bị, nâng cao độ tin cậy của thiết bị và tỷ lệ hoạt động của toàn bộ dây chuyền sản xuất.
Cánh tay máy phủ cản quang có phù hợp để bảo trì dự đoán không?
Có. Do cánh tay vận chuyển có đặc tính thực hiện số lượng lớn các thao tác lặp đi lặp lại nên rất thích hợp để thiết lập mô hình hành vi bình thường bằng máy học. Khi các tín hiệu chuyển động dần chệch khỏi phạm vi bình thường, có thể sắp xếp các công việc bảo trì trước để tránh thời gian ngừng máy đột ngột và tổn thất tỷ lệ đạt yêu cầu.
Đọc thêm
Ảnh hưởng của thiết bị Coater và vi rung động môi trường?
Lực hút chân không bất thường khi máy nạp (loader) hoạt động?
Bất thường do áp suất khí không đủ ở máy phun keo?
Ảnh hưởng của vi rung động môi trường đối với máy Laser Grooving?
Hệ thống giám sát thông minh học máy VMS-ML
Dự đoán tuổi thọ còn lại (RUL) của thiết bị là gì?
Tốc độ bảo trì tăng 7 lần, tiết kiệm ngân sách bảo dưỡng hàng năm