
监诊实绩

应用领域

常见问题
PVD、CVD 机台手臂如何确认作动是否稳定?
监诊实绩|PVD、CVD 机台手臂如何确认作动是否稳定?薄膜沉积的目的是在晶圆上增加导电特性,如何避免PVD 、CVD机台手臂异常影响制程?如何确保作动稳定?
CVD PVD 机台手臂对于制程的重要性
掌握机台状态,以确保高度的可靠性和稳定性
PVD及CVD机台通常包含多个部分,其中手臂是一个重要的组成部分。手臂主要用于将晶圆移动到不同的位置,以进行不同步骤的薄膜沉积。
当PVD机台的手臂发生异常时,可能会对制程产生多种影响,例如,制程可能需要停止或暂停,这会导致生产效率下降。停机时间越长,损失就越大。 PVD机台的手臂在整个制程中负责将晶圆移动到不同的位置,以确保薄膜均匀沉积。手臂的异常可能导致制程不一致,使得每个晶圆的处理结果不同。此外,手臂的异常影响到制程的安全性,可能会对操作人员和设备造成潜在的安全风险。因此,使用者必须掌握机台状态,以确保高度的可靠性和稳定性,以确保制程的顺利运行。

VHP-PVD-NSK

VHP-Producer-NSK
监测说明
VMS-ML机器学习智能监控系统
VMS-ML能够将CVD、PVD机台动态讯号与机械学习动作可视化,系统藉由学习机械动作并量测除了能够得知机台作动中稳定性差异,利用数据趋势可以说明机台的稳定度标准,还能够作为维修后的效益确认出机前的验证。
量测状况
1. 安装感测器:VMS-ML 外接sensor,不须与设备讯号对接!
立即开始为机台建立学习规范,进行机台状况监测。
机台动态讯号与机械学习动作可视化说明:
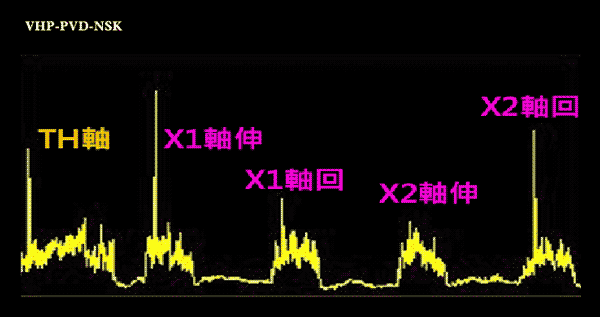
机型1:VHP-PVD-NSK
动作说明:TH轴旋转后,X1前伸回至原位后换X2作动。
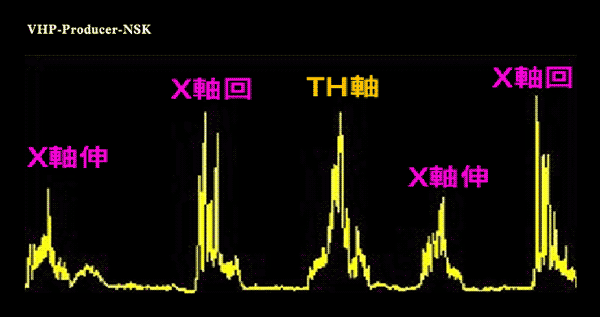
机型2:VHP-Producer-NSK
动作说明:X轴前伸回位后TH轴旋转至对向X轴前伸后回至原位。
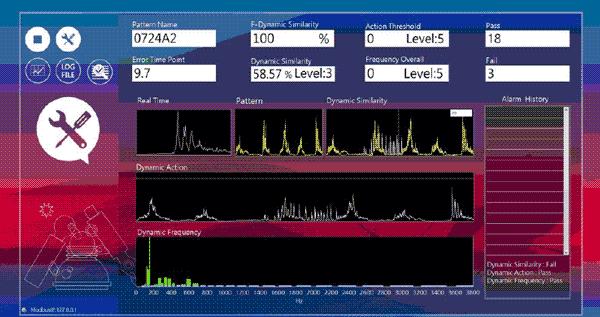
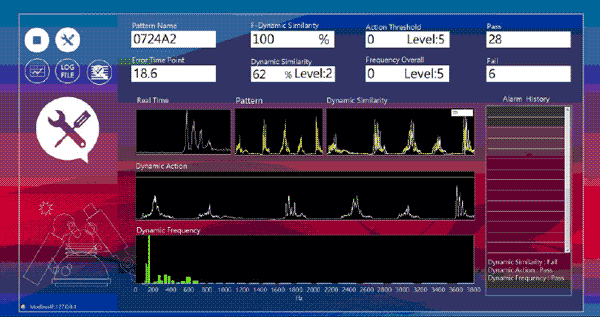
2.系统自动追踪特征讯号,在即时监测讯号中能够自动侦测标定过的目标讯号
从单纯到复杂的动作都可自动追踪识别。
机台VHP-PVD-NSK异常模拟判别与可视化管理:

判定结果:X1轴与X2轴运行颤振。

判定结果:X2轴启动收回突波异常。

判定结果:机台颤振。

判定结果:X2轴运行颤振。
机台VHP-Producer-NSK异常模拟判别与可视化管理:

判定结果:X轴前伸后收磨损。
判定结果:X轴前伸停止异常。

判定结果:机台颤振。
判定结果:TH轴启动异常。
测量结论
藉由VMS-ML能够为机台手臂作动流程中制定标准化,并抓出异常,避免因为手臂异常造成后续成品不良降低良率。将各式数据趋势化后能够掌握机台手臂状态,预测设备发生异常的时间点。也可作为日后机台入厂维修前后的比对标准依据。
VMS-ML机器学习智能监控系统
常见问题(FAQ)
PVD、CVD 机台手臂为什么需要监测作动稳定度?
PVD 与 CVD 机台手臂负责将晶圆移动到不同位置,以完成薄膜沉积製程。若手臂作动不稳、颤振或定位异常,可能造成製程中断、薄膜沉积不均、晶圆处理结果不一致,甚至影响设备与人员安全,因此需要即时监测手臂作动状态。
PVD、CVD 机台手臂异常会造成哪些製程影响?
手臂异常可能导致製程暂停、产能下降、晶圆搬送不稳、薄膜沉积不均、良率降低与后续成品不良。若异常未及时发现,也可能造成设备损坏或製程安全风险。
VMS-ML 如何监测 PVD、CVD 机台手臂?
VMS-ML 机器学习智能监控系统可外接 sensor,不需与设备讯号对接,即可学习机台手臂正常作动时的动态讯号。系统会将机械动作可视化,并自动追踪特徵讯号,判断手臂作动是否偏离正常模型。
PVD、CVD 手臂哪些动作可以被监测?
系统可监测 TH 轴旋转、X1 轴前伸回位、X2 轴作动、X 轴前伸后收,以及不同机型中的複杂连续动作。从单纯到複杂的机械动作,都可透过学习模型进行特徵追踪与异常辨识。
VMS-ML 可以判断哪些 PVD、CVD 手臂异常?
VMS-ML 可用于判断 X1 轴与 X2 轴运行颤振、X2 轴启动收回突波异常、机台颤振、X 轴前伸后收磨损、X 轴前伸停止异常与 TH 轴启动异常等状态,协助工程师快速掌握异常位置与型态。
导入 PVD、CVD 手臂监测有什么效益?
导入手臂监测后,可为机台手臂作动流程建立标准化规范,及早抓出异常,避免因手臂异常造成后续成品不良与良率下降。透过数据趋势化管理,也能预测设备异常时间点,并作为维修前后比对与入厂验证依据。