
监诊实绩

应用领域

常见问题
光阻涂佈机手臂动作如何监测,确保设备稳定度?
监诊实绩|光阻涂佈机手臂动作如何监测,确保设备稳定度?专用于光阻涂佈机搬送晶圆的机械手臂必须具有高度的精度和稳定性,确保减小机械振动对晶圆表面的影响,如何确保手臂稳定度?
光阻涂佈机手臂
专用于光阻涂佈机搬送晶圆的机械手臂
在光阻涂佈过程中会影响晶圆品质的因素有很多,例如手臂的精度、稳定性、速度、机械振动等因素都有密切相关。机械手臂必须具有高度的精度和稳定性,以确保光阻均匀涂佈在整个晶圆表面。如果机械手臂有不稳定性或精确度问题,可能导致光阻层不均匀,进而影响后续製程步骤的品质。机械手臂的振动可能会传递到晶圆上,造成振动对光阻均匀性的影响。 因此,确保减小机械振动对晶圆表面的影响是非常重要的。

监测说明
VMS-ML 机器学习智能监控系统
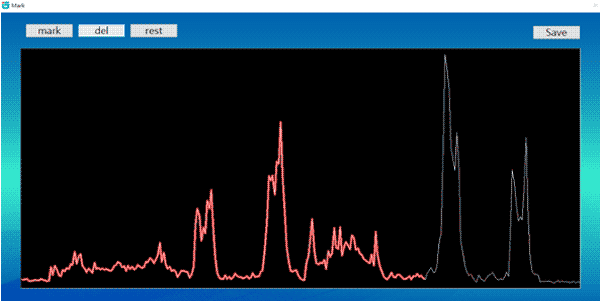
藉由 VMS-ML 机器学习智能监控系统,根据手臂取放晶圆、移动过程中,X轴、Y轴、Z轴、θ轴动作产生之综合振动动态,在优良状态下的进行规范学习,透过重复性的动作讯号辨识与规范比对结果,细拆检测手臂Z轴、Y轴θ轴、X轴与是否为稳定运行状态,当判定为非稳定运作时,提前进行处置,达到机械动作品质检测与预防保养目的。
量测状况
动作:Robot transfer from main arm to cassette
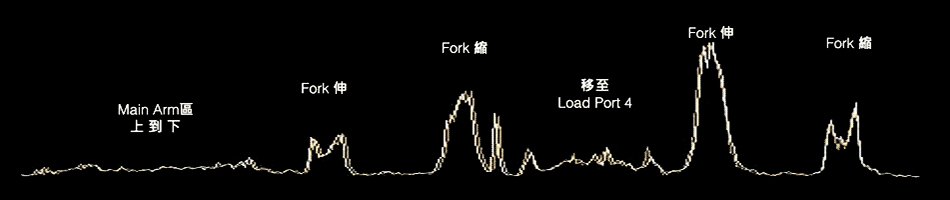
检测目的:1. Z轴移动品质监测。2. X轴 (wafer取放)移动品质监测。
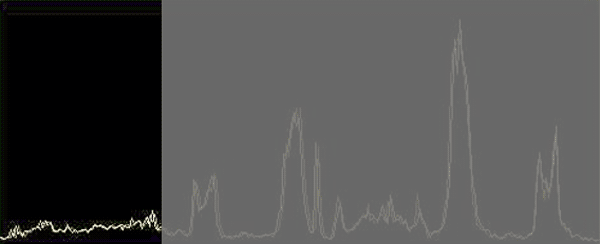
标记1:只针对Z轴判别
标记2:只针对X轴判别(放入slot1)
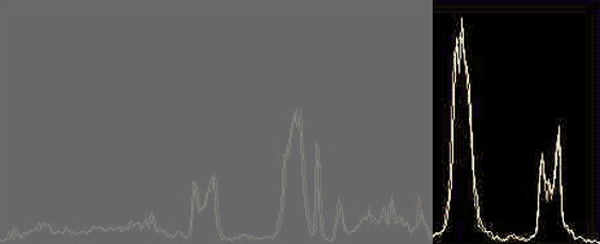
检测目的:1. Y轴(动作包含θ轴)移动品质监测。 2. X轴 (wafer取放)移动品质监测。
标记1:只针对Y轴与θ轴判别
标记2:只针对X轴判别
测量结论
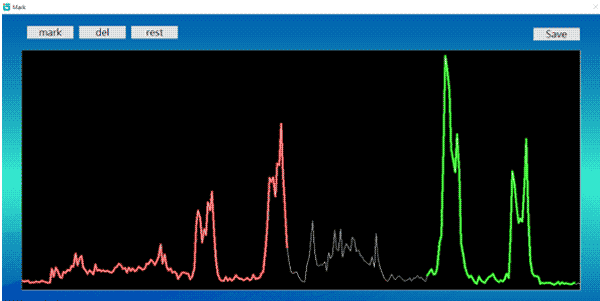
利用 VMS-ML 机器学习智能监控系统 学习正确动作行为作为规范,为各别动作进行监测与诊断,透过系统了解手臂在哪一个动作出现异常或不稳定的状态,提早进行预知保养,避免无预警异常的发生。
利用 VMS-ML 监测手臂健康状态能够带来的效益:防止手臂异常造成晶圆受损报废、监测手臂搬送晶圆流程,警报异常刮片、撞片等。
VMS-ML 机器学习智能监控系统
常见问题(FAQ)
光阻涂布机搬送手臂为什么需要监测?
光阻涂布机中的晶圆搬送手臂负责将晶圆精准搬送至涂布位置,其运动精度与稳定性会直接影响光阻均匀度与製程品质。若手臂产生异常振动、定位偏移或动作不稳定,可能造成光阻厚度不均、晶圆刮伤、撞片或製程良率下降,因此需透过即时监测掌握设备健康状态。
机械振动会如何影响光阻涂布品质?
光阻涂布製程需要极高的平整度与均匀性,若搬送手臂产生振动,振动能量可能传递至晶圆表面,造成光阻分布不均、厚度偏差及后续曝光製程异常,进而影响产品良率与製程稳定度。
VMS-ML 如何监测晶圆搬送手臂的健康状态?
VMS-ML 机器学习智能监控系统可学习手臂在正常状态下的动作讯号,并针对 X 轴、Y 轴、Z 轴及 θ 轴建立标准模型。当系统发现动态讯号与标准模型差异过大时,即可判定手臂可能出现异常或不稳定状态,提前发出警示。
哪些手臂动作可以进行监测?
系统可监测晶圆取放、搬送、定位、旋转及各轴向移动等重複性动作,透过动作讯号辨识与相似度分析,掌握各轴运作品质与稳定度。
导入手臂监测系统有哪些效益?
导入手臂监测系统可提前发现异常振动、定位偏差与机构磨耗问题,降低晶圆刮伤、撞片及製程中断风险。同时可透过长期趋势分析建立设备健康管理机制,提升设备可靠度与整体产线稼动率。
光阻涂布机手臂适合做预知保养吗?
适合。由于搬送手臂具备大量重複性动作特性,非常适合利用机器学习建立正常行为模型。当动作讯号逐渐偏离正常范围时,即可提前安排维护作业,避免无预警停机与良率损失。