
Thực tế

Ứng dụng

Hỏi đáp
Trong nhà máy có nhiều máy công cụ, làm thế nào để sắp xếp thứ tự bảo trì?
Thực tế giám sát| Trong nhà máy có nhiều máy công cụ, làm thế nào để sắp xếp thứ tự bảo trì?Trong các loại thiết bị tự động hóa, động cơ chiếm số lượng lớn nhất. Đối với độ chính xác điều khiển của máy công cụ, chủ yếu sử dụng động cơ servo và động cơ bước. Khi số lượng máy công cụ nhiều, làm thế nào để kiểm tra nhanh chóng, hiệu quả và sắp xếp lịch bảo trì, sửa chữa một cách hợp lý?
Nguyên lý hoạt động của động cơ servo
Trong các loại thiết bị tự động hóa, động cơ chiếm số lượng lớn nhất.
Đối với yêu cầu độ chính xác của máy công cụ, động cơ servo và động cơ bước là hai loại chính.
Vậy động cơ servo là gì? Động cơ servo (Servomotor) được chia thành loại DC và AC, có tốc độ phản hồi nhanh và có thể đạt trên 2000 vòng/phút trong thời gian ngắn.
Đặc tính vận hành của động cơ servo là điều khiển chính xác vị trí và tốc độ.
Các ưu điểm chính bao gồm khả năng kiểm soát tốc độ chính xác, dải điều khiển tốc độ rộng, vận hành ổn định và êm ái ở tốc độ không đổi, đồng thời có thể thay đổi tốc độ linh hoạt theo nhu cầu.
Ngay cả ở tốc độ rất thấp, động cơ vẫn có thể hoạt động ổn định.
Động cơ cũng có khả năng đảo chiều nhanh, tăng giảm tốc tức thời, thời gian chuyển đổi giữa trạng thái tĩnh và động rất ngắn.
Ngay cả khi có ngoại lực tác động, động cơ vẫn giữ được vị trí.
Trong phạm vi công suất định mức, động cơ có thể tạo ra mô-men xoắn lớn tức thời, công suất đầu ra cao và hiệu suất tốt.
Nguồn: Wikipedia

Giải pháp và mô tả giám sát
VMS-PH – Thiết bị phân tích chất lượng động học
Sử dụng thiết bị phân tích chất lượng động học VMS-PH để so sánh tín hiệu động học trong quá trình vận hành của động cơ servo và ray trượt,
từ đó dựa trên kết quả so sánh để sắp xếp và lập kế hoạch bảo trì, sửa chữa một cách hợp lý.
Tình trạng đo lường
1. Vị trí đo: Hướng thẳng đứng tại vỏ động cơ khởi động bên trái ray trượt.
Thiết bị đo: A、B、C、D、E、F、G、H.
Mục đích đo: Đánh giá chất lượng động cơ servo.
2. Vị trí đo: Hướng ngang bên phải ray trượt.
Thiết bị đo: A、B、C、F、G、H.
Mục đích đo: Đánh giá chất lượng ray trượt.
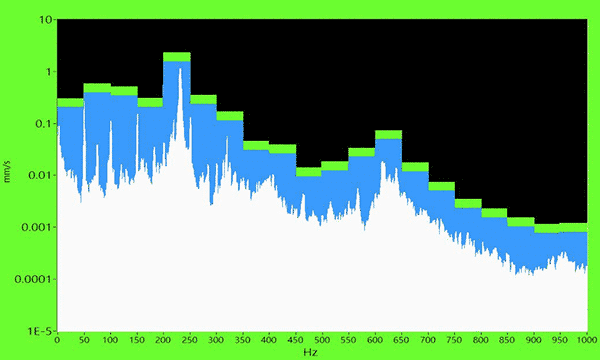
Phân tích phổ tần: Sử dụng ngưỡng phổ thông minh để quản lý tình trạng vận hành của thiết bị.
1. Điểm đo theo phương thẳng đứng tại vỏ động cơ khởi động bên trái ray trượt trục X
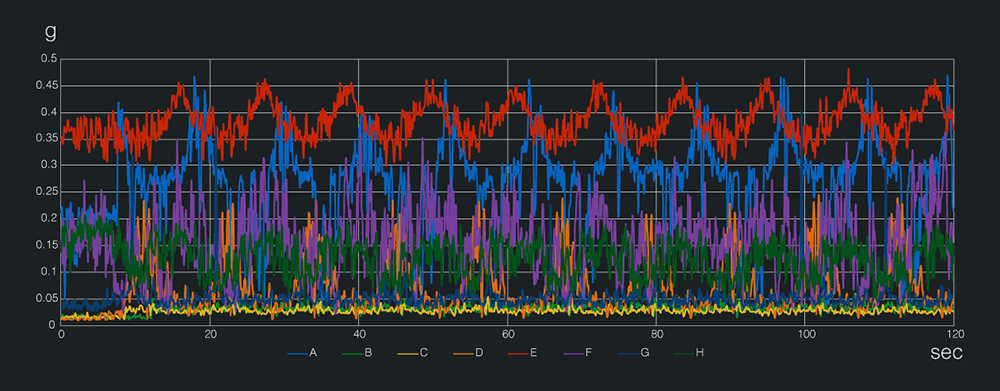
Chất lượng động cơ servo
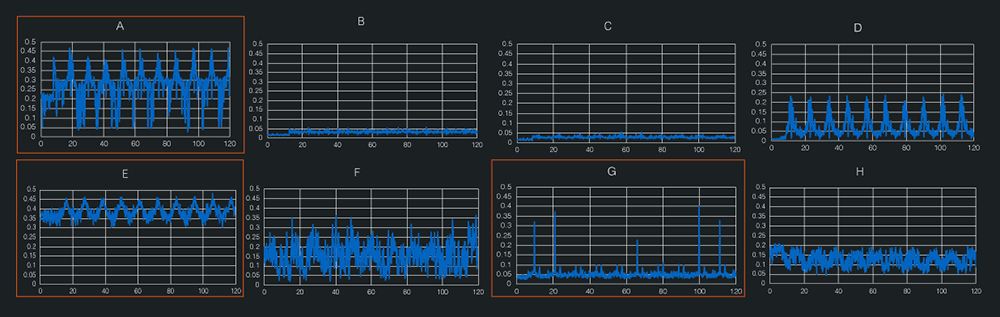
Kết quả: Động cơ servo của thiết bị A và E có biên độ rung lớn hơn; thiết bị G xuất hiện tín hiệu đặc trưng bất thường.
2. Điểm đo theo phương ngang ray trượt trục X
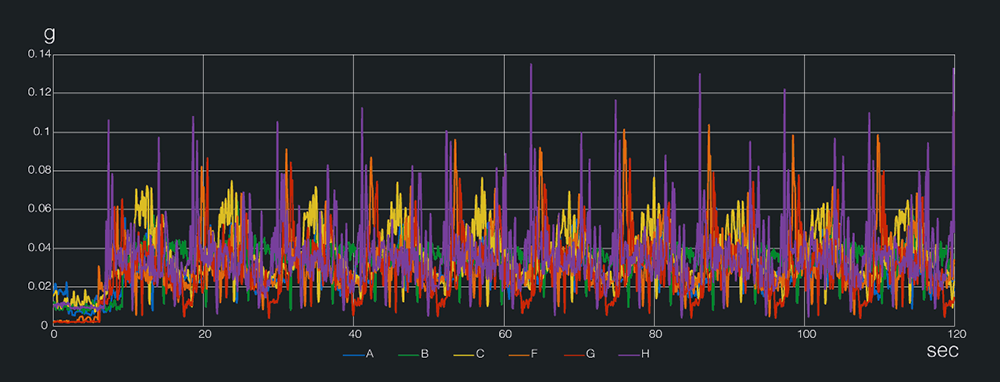
Chất lượng ray trượt
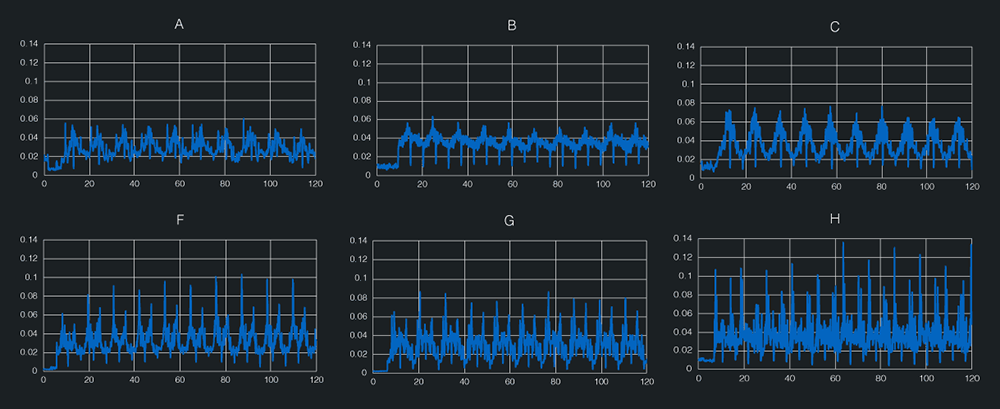
Kết quả: Phân tích động lực học chất lượng ray trượt: H → F → G → C → B → A
Chức năng phát hiện ngưỡng phổ thông minh
Cảnh báo phát hiện phổ tần bất thường
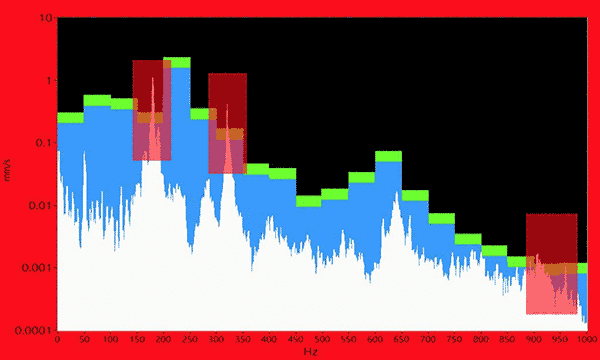
Đối với trục X, có thể thiết lập ngưỡng thông minh riêng cho từng thiết bị. Khi xuất hiện rung động ở tần số khác thường, hệ thống sẽ ngay lập tức phát hiện sự sai lệch.
Kết luận đo lường
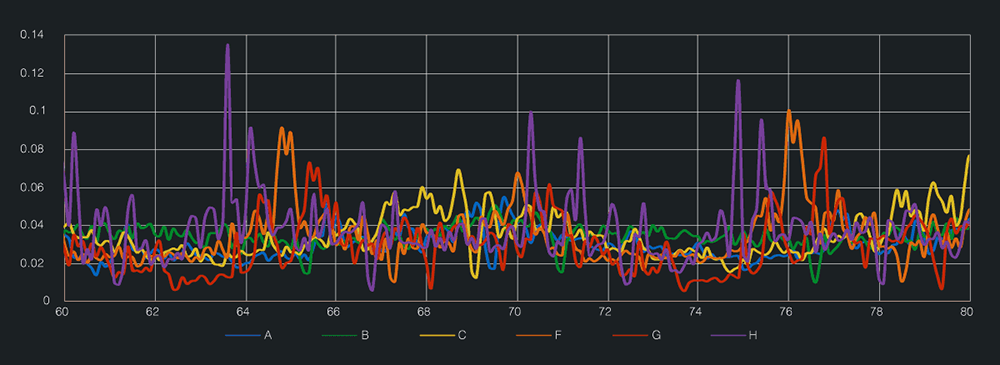
Giả sử ngưỡng giá trị g của ray trượt trục X được thiết lập là 0.08
Trong đó, H có giá trị lớn nhất, tiếp theo là F và G. Ba thiết bị này có mức lệch giá trị g lớn nhất so với các máy còn lại,
do đó nên ưu tiên kiểm tra tình trạng của máy H trước.
Điểm đo trục X được khuyến nghị đặt tại vị trí bên phải theo phương ngang.
Dựa trên kết quả phân tích động lực học trục X trong lần đo này,
nên bắt đầu kiểm tra trạng thái động của trục X theo thứ tự H → F → G.
Điểm đo theo phương thẳng đứng của trục X có thể dùng để so sánh sự khác biệt tín hiệu động của động cơ servo giữa các máy
A và E có giá trị lớn nhất; G xuất hiện tín hiệu đặc trưng bất thường.
Phân tích phổ tần giúp xác nhận hành vi của thiết bị trong miền tần số.
Việc thiết lập ngưỡng thông minh cho phép nhanh chóng phân biệt sự khác biệt phổ tần,
từ đó nắm bắt được tình trạng thay đổi của từng máy.
Thiết bị phân tích đo rung được thiết kế dành cho các thiết bị và máy móc cao cấp, tích hợp sẵn các chức năng như phân tích phổ tần, phân tích thời gian–tần số, hệ số truyền rung và phân tích động lực học. Thiết bị có thể được sử dụng để đo và phân tích trực tiếp ngay tại hiện trường bên cạnh máy cần kiểm tra, giúp người sử dụng nhanh chóng và chính xác xác định nguyên nhân gốc rễ của sự cố thiết bị.
VMS-PM Máy phân tích động lực cơ khí
VMS-PH Thiết bị phân tích động lực thiết bị
Xác định chính xác điểm nguyên nhân cốt lõi của sự cố thiết bị
Các câu hỏi thường gặp (FAQ)
Động cơ Servo (Servo Motor) là gì?
Động cơ Servo là loại động cơ có khả năng điều khiển vị trí và tốc độ chính xác, với đặc tính phản hồi cao, độ chính xác cao và hiệu suất cao. Nó được ứng dụng rộng rãi trong các máy công cụ, thiết bị tự động hóa, cánh tay robot và thiết bị sản xuất chính xác.
Tại sao máy công cụ cần giám sát trạng thái động cơ servo?
Động cơ servo ảnh hưởng trực tiếp đến độ chính xác định vị của thiết bị, chất lượng điều khiển chuyển động và độ ổn định gia công. Nếu động cơ xuất hiện rung động bất thường, mài mòn hoặc sai số điều khiển, có thể dẫn đến giảm độ chính xác gia công, chất lượng sản phẩm bất thường và thời gian ngừng máy.
Làm thế nào để nhanh chóng tìm ra các máy công cụ cần ưu tiên bảo trì?
Thông qua đo lường rung động và quản lý ngưỡng thông minh, có thể so sánh sự khác biệt về tín hiệu động giữa các thiết bị. Khi giá trị rung động của một thiết bị bị lệch đáng kể so với các thiết bị khác, có thể ưu tiên sắp xếp kiểm tra và bảo trì.
Quản lý ngưỡng thông minh là gì?
Quản lý ngưỡng thông minh là việc sử dụng dữ liệu hoạt động bình thường của thiết bị để thiết lập một phạm vi tiêu chuẩn. Khi tín hiệu rung động vượt quá ngưỡng đã thiết lập, có thể nhanh chóng nhận diện thiết bị bất thường, nâng cao hiệu quả quản lý thiết bị.
Phân tích phổ có thể cho thấy những vấn đề gì?
Phân tích phổ có thể hỗ trợ xác định nguồn gốc rung động của thiết bị, ví dụ như thanh trượt bất thường, rung động động cơ servo, cộng hưởng cấu trúc, mài mòn vòng bi hoặc các bất thường đặc trưng tần số khác, từ đó xác nhận thêm vị trí vấn đề thực tế của thiết bị.
Lợi ích của việc triển khai giám sát rung động động cơ servo là gì?
Có thể nhanh chóng nắm bắt trạng thái sức khỏe của thiết bị, thiết lập thứ tự ưu tiên bảo trì, giảm rủi ro thời gian ngừng máy ngoài dự kiến, nâng cao tỷ lệ hoạt động của thiết bị và đóng vai trò là nền tảng quan trọng cho bảo trì dự đoán và sản xuất thông minh.
Đọc thêm
Rung lắc bất thường của máy đột dập lưới tốc độ cao gây ra phế phẩm?
Bất thường hàn kim loại tấm ô tô gây ra liên kết kém?
Kẹt phoi ở máy tiện kiểu Thụy Sĩ ảnh hưởng đến chất lượng quy trình?
Bất thường ở khuôn dập gây ra lượng lớn phế phẩm?
Máy phân tích động lực thiết bị VMS-PH
Giám sát thiết bị sản xuất
Tốc độ bảo trì tăng 7 lần, tiết kiệm ngân sách bảo dưỡng hàng năm