
Thực tế

Ứng dụng

Hỏi đáp
Làm thế nào để ngăn ngừa wafer bị trầy xước trong quá trình vận chuyển?
Thực tế giám sát| Làm thế nào để ngăn ngừa wafer bị trầy xước trong quá trình vận chuyển?Cánh tay robot vận chuyển wafer (Wafer Robot) nếu xuất hiện rung động bất thường trong quá trình vận chuyển có thể gây ra hiện tượng trầy xước, va chạm wafer. Làm thế nào để phát hiện sớm và phòng ngừa, tránh wafer bị hư hỏng và phải loại bỏ?
Cánh tay robot chuyên dụng cho vận chuyển wafer
Cánh tay robot wafer chủ yếu được ứng dụng trong các công đoạn tiền xử lý của quy trình sản xuất bán dẫn, có thể thay thế con người trong việc vận chuyển wafer. Do chi phí wafer rất cao, người sử dụng đặc biệt coi trọng độ ổn định của cánh tay robot trong quá trình truyền tải.
Về mặt cấu trúc, cánh tay robot wafer thường được thiết kế với nhiều trục chuyển động, giúp thiết bị có thể vận chuyển wafer một cách chính xác và ổn định trong không gian hẹp. Tuy nhiên, nếu trong quá trình vận chuyển xuất hiện rung động bất thường, chất lượng wafer sẽ bị ảnh hưởng nghiêm trọng, dễ dẫn đến trầy xước hoặc va chạm wafer.
Do cánh tay robot wafer có đặc tính chuyển động đa trục, vậy làm thế nào để thực hiện giám sát và đánh giá trạng thái vận hành một cách hiệu quả?

Giải pháp & mô tả giám sát
Hệ thống giám sát thông minh học máy VMS-ML
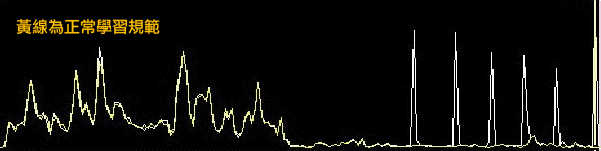
Thông qua hệ thống VMS-ML, các tín hiệu động học phát sinh trong quá trình vận chuyển wafer của cánh tay robot sẽ được học và chuẩn hóa.
Hệ thống không cần kết nối trực tiếp với hệ điều khiển của thiết bị, chỉ cần lắp đặt một cảm biến là có thể bắt đầu thu thập và học tín hiệu động.
Thông qua việc đo lường và phân tích, hệ thống có thể nhanh chóng xác định sự thay đổi trạng thái ở từng giai đoạn vận chuyển, từ đó hỗ trợ phát hiện sớm rung động bất thường và triển khai bảo trì dự đoán, giúp giảm thiểu nguy cơ trầy xước hoặc va chạm wafer.
Tình trạng đo lường
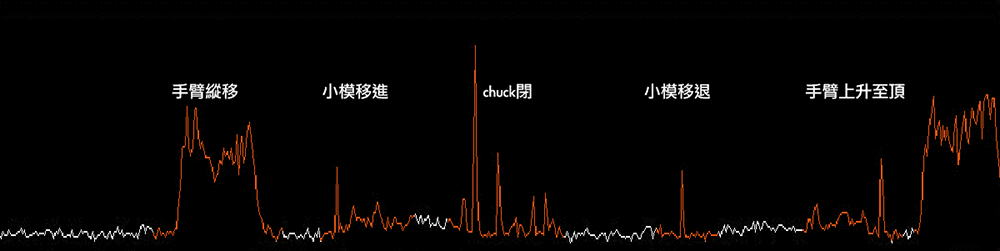
Giám sát so sánh hình ảnh trực quan chuyển động của cánh tay Wafer Robot
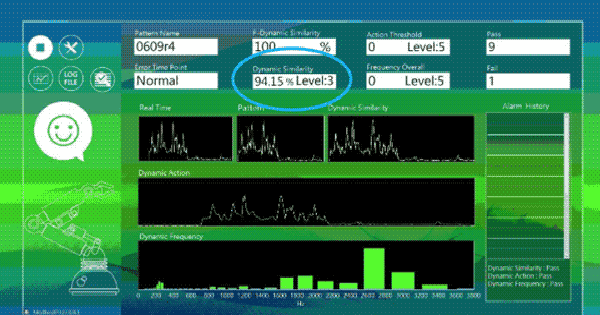
Giao diện đo lường và giám sát bằng hệ thống học máy
Trạng thái giám sát: Bình thường – Pass
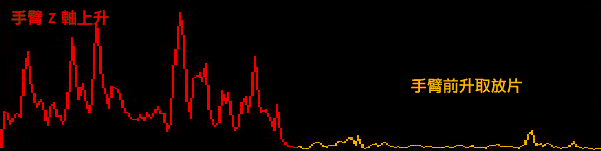
Chuyển động truyền wafer của tay robot ổn định, mỗi lần vận hành mô hình chuẩn
và tín hiệu giám sát trực quan bám sát nhau.
Điểm tương đồng: 94%
Trạng thái giám sát: Cảnh báo bất thường – Fail

Mô phỏng tình trạng bất thường bằng cách tác động nhẹ lên fork.
Tín hiệu động và miền tần số thay đổi, dẫn đến điểm tương đồng giảm.
Điểm tương đồng: 66%
Kết luận đo lường
Thông qua việc sử dụng hệ thống giám sát thông minh học máy VMS-ML để học các hành vi chuyển động chuẩn làm tiêu chuẩn, hệ thống có thể giám sát và chẩn đoán từng hành động riêng biệt. Nhờ đó, người dùng có thể xác định chính xác chuyển động nào của thiết bị đang xuất hiện trạng thái bất thường hoặc không ổn định, từ đó thực hiện bảo trì dự đoán sớm, tránh xảy ra các sự cố đột ngột không có cảnh báo.
Lợi ích đạt được khi sử dụng VMS-ML để giám sát tình trạng sức khỏe của tay robot bao gồm:
ngăn ngừa các bất thường của tay robot gây hư hỏng hoặc làm wafer bị loại bỏ,
giám sát toàn bộ quy trình vận chuyển wafer của tay robot,
đồng thời phát cảnh báo sớm các hiện tượng bất thường như trầy xước wafer hoặc va chạm wafer.
Thông qua việc thu thập dữ liệu xu hướng lịch sử tình trạng sức khỏe,
hệ thống có thể làm cơ sở tham khảo cho kế hoạch bảo trì mang tính dữ liệu hóa.
Ngoài ra, hệ thống còn cho phép thực hiện kiểm tra độ ổn định trước và sau khi bảo trì,
nhằm xác nhận chất lượng sửa chữa và hiệu quả của công tác bảo dưỡng.

VMS-ML Hệ thống giám sát thông minh học máy
Kiểm soát trạng thái vận chuyển wafer của tay robot