
监诊实绩

应用领域

常见问题
如何预防晶圆在运送过程中产生刮片?
监诊实绩|如何预防晶圆在运送过程中产生刮片?搬送晶圆的机械手臂 (Wafer Robot),运送过程若出现异常振动有可能将导致晶圆片刮片、撞片等,该如何提早预防避免晶圆片受损报废?
专用于搬送晶圆的机械手臂
晶圆手臂多数应用在半导体製程的前段中,能够替代人力进行晶圆片的传输,晶圆片的成本费用高昂,因此用户也非常重视手臂在传输上的稳定度。晶圆手臂在结构上大都有多轴向关节,使其能够更方便在狭小的空间里准确而稳定的输送晶圆。而在搬运过程中手臂若出现异常振动,将大幅影响着晶圆品质,可能导致刮片、撞片等。而晶圆手臂有各种多轴方向性,该如何进行监测呢?

解决与监测说明
VMS-ML 机器学习智能监控系统
藉由 VMS-ML 机器学习智能监控系统 学习晶圆手臂输送过程的动态讯号,本系统无需与设备系统进行对接,只需安装一颗sensor即可开始学习动态讯号,藉由量测即可得知各区段的变化。
量测状况
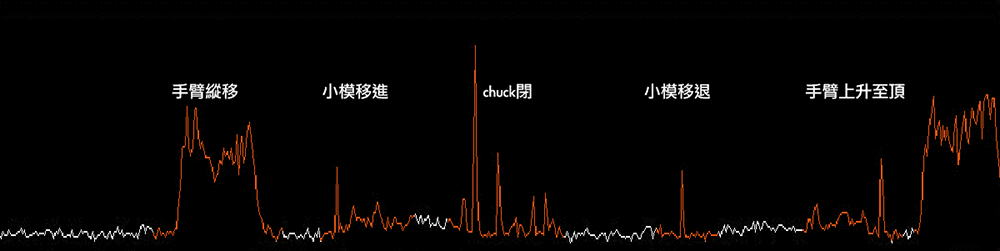
Wafer Robot 搬送手臂动作可视化图像比对监测
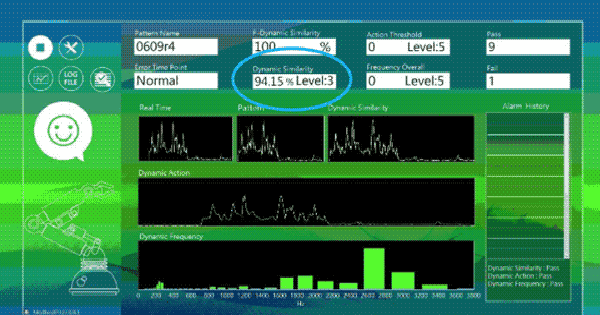
机械学习监控量测画面
监测状态:正常 Pass
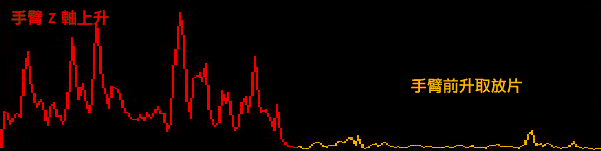
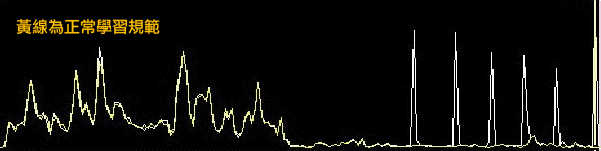
手臂传送动作正常,每次动作规范与监测动作可视化图形紧密贴紧。
相似度分数:94%
监测状态:异常警报Fail

模拟异常状况轻敲fork。动态讯号与频域改变,造成相似度判分判分下降。
相似度分数:66%
测量结论
利用 VMS-ML 机器学习智能监控系统 学习正确动作行为作为规范,为各别动作进行监测与诊断,透过系统了解设备在哪一个动作出现异常或不稳定的状态,提早进行预知保养,避免无预警异常的发生。
利用 VMS-ML 监测手臂健康状态能够带来的效益:防止手臂异常造成晶圆受损报废、监测手臂搬送晶圆流程,警报异常刮片、撞片。藉由收集健康历程趋势,作为数据化保养计画参考依据。并可在维修保养前后进行稳定度测试,确认维修品质、保养效果。
VMS-ML 机器学习智能监控系统
VMS-ML 机器学习智能监控系统
掌握手臂输送晶圆状态
常见问题(FAQ)
Wafer Robot 晶圆搬送手臂为什么需要监测?
Wafer Robot 负责在半导体製程中搬送高价值晶圆,若搬送过程出现异常振动、动作不稳或定位偏差,可能造成晶圆刮片、撞片甚至报废。因此需要透过监测系统掌握手臂搬送状态,提前发现异常并降低晶圆受损风险。
晶圆搬送手臂异常振动会造成哪些问题?
晶圆搬送手臂若在传输过程中产生异常振动,可能造成晶圆与机构、Fork 或载具接触,导致刮片、撞片、位置偏移、搬送失败与製程中断。对半导体厂而言,这类异常可能造成高额晶圆损失与设备停机风险。
VMS-ML 如何监测 Wafer Robot 搬送状态?
VMS-ML 机器学习智能监控系统可学习 Wafer Robot 正常搬送晶圆时的动态讯号,不需要与设备系统对接,只需安装一颗 sensor 即可开始学习。系统会将手臂动作转换为可视化图像,并透过相似度比对判断每次搬送动作是否稳定。
Wafer Robot 动作相似度分数代表什么?
动作相似度分数代表目前监测到的手臂动态讯号与正常动作规范之间的接近程度。当手臂传送动作正常时,监测图形会与规范图形紧密贴合,相似度分数可达 94%。若模拟异常状况,例如轻敲 Fork,动态讯号与频域会改变,使相似度分数下降至 66%,并触发异常警报。
Wafer Robot 监测可以判断哪一个动作异常吗?
可以。VMS-ML 会学习正确动作行为作为规范,并针对各别动作进行监测与诊断。当某一段搬送动作出现不稳定或异常时,系统可协助工程人员了解异常发生在哪一个动作区段,利于后续维修与保养判断。
导入 Wafer Robot 健康监测有什么效益?
导入 Wafer Robot 健康监测后,可防止手臂异常造成晶圆受损报废,并即时警报刮片、撞片等搬送风险。透过长期收集健康历程趋势,也可作为数据化保养计画参考,并在维修保养前后进行稳定度测试,确认维修品质与保养效果。