
Thực tế

Ứng dụng

Hỏi đáp
Sử dụng dòng điện để đánh giá chất lượng trạng thái vận hành của robot đa trục?
Thực tế giám sát|Sử dụng dòng điện để đánh giá chất lượng trạng thái vận hành của robot đa trục?Robot cơ khí đa trục là loại robot nhiều khớp, khi cần tạo ra mô-men xoắn lớn hơn thì động cơ phải sử dụng dòng điện lớn hơn để thực hiện chuyển động.
Robot cơ khí đa trục
Robot cơ khí đa trục giống như những vũ công trong ngành công nghiệp, có khả năng chuyển động linh hoạt trong không gian ba chiều. Mỗi khớp của robot giống như một bước nhảy, được dẫn động bởi động cơ hoặc servo motor, tương tự như cơ bắp của con người. Các động cơ này hoạt động kết hợp với hộp giảm tốc nhằm tạo ra mô-men xoắn lớn hơn và kiểm soát chuyển động chính xác hơn. Thông qua việc điều khiển chuyển động của các động cơ, robot có thể thực hiện các chuyển động tại từng khớp một cách linh hoạt và chính xác.
Giữa hệ thống truyền động của robot đa trục và dòng điện tồn tại mối quan hệ mật thiết, bởi vì động cơ được vận hành thông qua dòng điện. Khi robot thực hiện các chuyển động, động cơ tại mỗi khớp sẽ tiêu thụ năng lượng điện để tạo ra mô-men xoắn. Do đó, dòng điện của động cơ sẽ thay đổi tương ứng theo trạng thái vận hành của robot.
Cụ thể, khi robot cần tạo ra mô-men xoắn lớn hơn, động cơ sẽ yêu cầu dòng điện cao hơn. Trường hợp này thường xảy ra khi robot mang tải nặng hơn hoặc cần vượt qua lực cản, chẳng hạn như khi nâng vật nặng hoặc chống lại tác động từ bên ngoài. Ngược lại, khi robot hoạt động với tải nhẹ hoặc ở trạng thái tĩnh, dòng điện cần thiết cho động cơ sẽ ở mức thấp hơn.

Độ rơ (Backlash)
Độ rơ (backlash) có thể được ví như một “vùng chết” nhỏ trong hệ thống cơ khí, tương tự như khe hở vi mô giữa các răng bánh răng. Bạn có thể hình dung nó như một hiện tượng trễ: khi bạn bắt đầu xoay bánh răng, sẽ có một khoảng trễ rất nhỏ trước khi chuyển động thực sự xảy ra, nguyên nhân chính là do độ rơ tồn tại.
Trong nhiều trường hợp, sự trễ này là điều không mong muốn, đặc biệt đối với các ứng dụng yêu cầu độ chính xác cao. Tuy nhiên, trong một số tình huống khác, một mức độ rơ nhất định lại là cần thiết, giúp các bộ phận cơ khí vận hành linh hoạt hơn và tránh hiện tượng kẹt cứng khi chuyển động.
Sự tồn tại của độ rơ xuất phát từ nhiều nguyên nhân, chẳng hạn như để đảm bảo bôi trơn cơ khí hiệu quả, do dung sai gia công, do tính đàn hồi khi chịu tải, hoặc do hiện tượng giãn nở – co ngót nhiệt khi nhiệt độ thay đổi. Trong các hệ thống cơ khí, độ rơ đôi khi là yếu tố cần thiết, đôi khi có thể chấp nhận được, và trong một số trường hợp khác thì cần được giảm thiểu tối đa.
Mô tả giám sát
Hệ thống giám sát thông minh học máy VMS-ML
Hệ thống VMS-ML có khả năng học các chuẩn vận hành đúng, sau đó sử dụng các chuẩn này để so sánh và đánh giá tình trạng hoạt động của thiết bị. Trong lần đo này, chúng tôi thực hiện giám sát dòng điện bằng cách sử dụng cảm biến CT lắp đặt trong tủ điều khiển điện.
Do sự thay đổi dòng điện của robot đa trục là tổng hợp từ nhiều trục chuyển động cùng lúc, nên tín hiệu dòng điện thường bị chồng lẫn và khó phân biệt riêng lẻ. Vì vậy, khi áp dụng phương pháp giám sát bằng dòng điện, chúng tôi lựa chọn các chuyển động chỉ bao gồm một trục hoặc số lượng trục ít làm đối tượng giám sát. Thông qua kết quả đo, có thể đánh giá mức độ ổn định trong chuyển động của robot.
Tình trạng đo lường
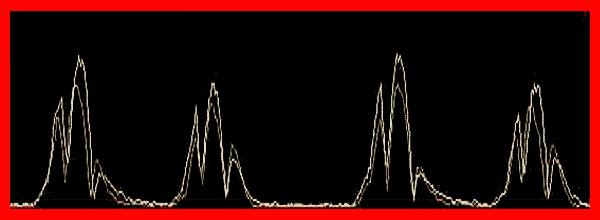
Thiết lập chuẩn vận hành

So sánh chi tiết có tiếng ồn bất thường
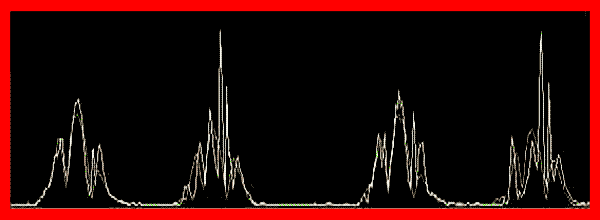
So sánh chi tiết bị rung giật
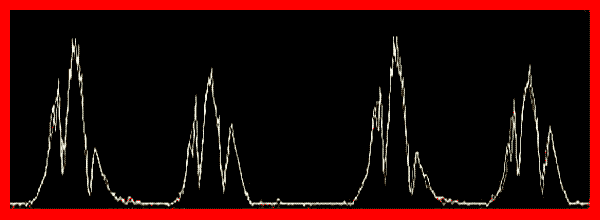
So sánh chi tiết có độ rơ (Backlash)
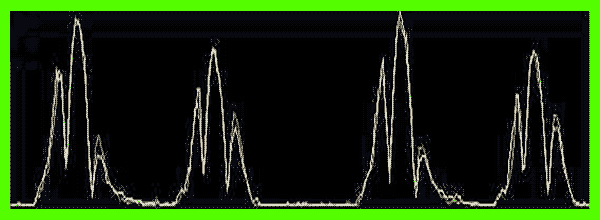
So sánh chi tiết bình thường (có tiếng ồn nhẹ)
Kết luận đo lường
Dựa trên tín hiệu phản hồi từ cảm biến và quá trình so sánh dữ liệu trong hệ thống, có thể xác nhận rằng trạng thái dòng điện của động cơ ảnh hưởng trực tiếp đến chất lượng chuyển động của tay máy. Khi dòng điện của động cơ duy trì ổn định, hệ thống có thể đạt được khả năng điều khiển chuyển động chính xác hơn. Điều này giúp đảm bảo tay máy vận hành ổn định trong nhiều điều kiện làm việc khác nhau, đồng thời giảm thiểu tiêu hao năng lượng và hạn chế mài mòn động cơ.
VMS-ML Machine Learning
VMS-ML Machine Learning
Phát hiện và ngăn chặn kịp thời sản phẩm lỗi
Các câu hỏi thường gặp (FAQ)
Tại sao hàn tự động cần giám sát chất lượng?
Mặc dù hàn tự động có thể nâng cao hiệu suất sản xuất, giảm chi phí nhân công và tăng tính nhất quán của sản phẩm, nhưng chất lượng mối hàn vẫn có thể bị ảnh hưởng bởi tình trạng thiết bị, độ ổn định của vật liệu đầu vào, đầu ra dòng điện và các điều kiện quy trình. Nếu thiếu giám sát theo thời gian thực, có thể gây ra khuyết tật mối hàn, sót mối hàn, biến động chất lượng và tăng chi phí làm lại.
Tại sao kiểm tra thủ công chất lượng mối hàn dễ bị thiếu nhất quán?
Việc kiểm tra thủ công thường phụ thuộc vào kinh nghiệm và sự đánh giá bằng mắt thường của người vận hành, dễ bị ảnh hưởng bởi sự mệt mỏi, độ tập trung, tiêu chuẩn chủ quan và môi trường làm việc. Đặc biệt trong sản xuất hàng loạt, kiểm tra thủ công không chỉ tốn thời gian mà còn dễ gây ra kết quả kiểm tra không nhất quán, từ đó ảnh hưởng đến hiệu suất sản xuất và độ ổn định của chất lượng sản phẩm.
VMS-ML giám sát chất lượng hàn tự động như thế nào?
Hệ thống giám sát thông minh học máy VMS-ML có thể thu thập tín hiệu quá trình hàn ở bên ngoài thiết bị thông qua cảm biến rung và dòng điện mà không cần kết nối giao tiếp với máy móc. Hệ thống có thể xây dựng mô hình hành vi hàn bình thường, và thông qua việc so sánh độ tương đồng và ngưỡng xu hướng để xác định xem hành vi gia công hàn điểm là bình thường hay bất thường.
Cảm biến dòng điện có thể phát hiện sót mối hàn không?
Có. Tín hiệu dòng điện trong quá trình hàn có thể phản ánh năng lượng hàn và trạng thái quy trình. Khi xảy ra sót mối hàn hoặc hàn bất thường, dạng sóng dòng điện sẽ tạo ra sự khác biệt so với trạng thái sản xuất sản phẩm bình thường. Do đó, có thể thông qua cảm biến dòng điện và mô hình học máy để tiến hành nhận dạng theo thời gian thực và ngăn chặn phế phẩm.
Giám sát hàn tự động có thể làm giảm những vấn đề sản xuất nào?
Giám sát hàn tự động có thể giảm bớt sự thiếu nhất quán trong kiểm tra thủ công, khuyết tật mối hàn không được phát hiện kịp thời, lọt sót mối hàn ra ngoài, tăng chi phí làm lại và kéo dài chu kỳ sản xuất. Thông qua giám sát thời gian thực và đánh giá chuẩn hóa, có thể nâng cao tính nhất quán của chất lượng mối hàn và hiệu quả quản lý dây chuyền sản xuất.
Lợi ích của việc triển khai giám sát thông minh hàn tự động là gì?
Sau khi triển khai giám sát thông minh, có thể nắm bắt theo thời gian thực tình trạng hoạt động, động lực học và trạng thái hao mòn của thiết bị hàn, đồng thời sử dụng máy học để so sánh hành vi gia công bình thường và bất thường. Điều này giúp nâng cao tỷ lệ đạt yêu cầu của sản phẩm, chuẩn hóa chất lượng, giảm chi phí vận hành nhà máy và có thể mở rộng để xây dựng hệ thống phòng điều hành (situation room) quản lý toàn nhà máy.
Đọc thêm
Sự cố hàn đinh tán tự động gây ra liên kết vật thể kém?
Sử dụng dòng điện để hiểu chất lượng trạng thái hoạt động của cánh tay robot nhiều trục?
Sự cố hàn kim loại tấm ô tô gây ra liên kết kém?
Thiết bị hoạt động tải cao trong thời gian dài, động cơ thiết bị quan trọng bị lỗi?
Hệ thống giám sát thông minh học máy VMS-ML
Giám sát thiết bị sản xuất
Tốc độ bảo trì tăng 7 lần, tiết kiệm ngân sách bảo dưỡng hàng năm